

Есть знаменитая поговорка: «мы построили этот дом из грязи и палок, но палок было мало». Создатели оригинального робота, просто прикрепили сервоприводы к трём сухим палкам. Вот те пожалуйста оно даже живое. Цель эксперимента была оправдана. Осталось только увидеть робота из грязи, и тогда можно будет сказать «теперь я видел всё».
Роботам не обязательно быть сложными, если не предъявлять к ним завышенных требований. Созданный японскими инженерами экспериментальный образец состоит из пары сервоприводов и мусора с заднего двора. Плюс — алгоритмы глубокого обучения.
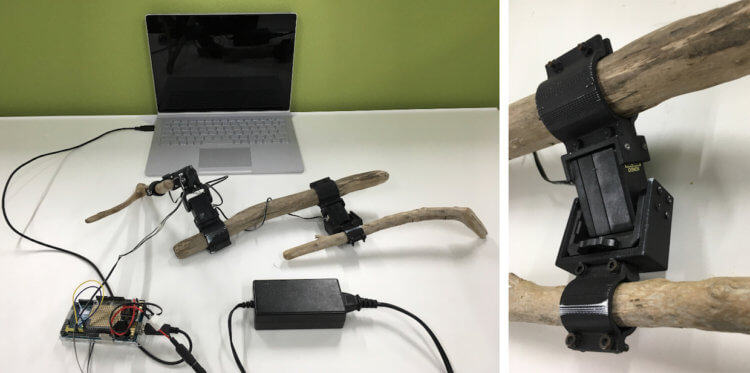
Считается, что создание роботов требует долгой и тщательной разработки всех элементов конструкции, в противном случае он не сможет выполнять заданные функции. Однако исследование специалистов Токийского университета и ИИ-компании Preferred Networks опровергает это утверждение. Их работа посвящена обучению двигательным навыкам машин с конечностями нетрадиционной или произвольной формы, пишет IEEE Spectrum. Для этого они собрали своего робота из пары сервоприводов и палок.
Сначала созданный специалистами робот учился ходить в программе-симуляции при помощи обучения с подкреплением. Инженеры подобрали на улице несколько обычных веток в форме букв Y и I, взвесили их и отсканировали в 3D, прикрепили к ним приводы и несколько датчиков, а затем задали алгоритму задачу разработать наиболее быструю походку. В финальной фазе были уже вручную внесены некоторые улучшения.
Едва ли эта технология приобретет популярность, но возможность создать робота буквально из того, что валяется под ногами не может не привлекать. Можно не беспокоиться о хрупких или дорогостоящих деталях или о транспортировке тяжелого робота, когда самые габаритные его части можно сделать из подручных материалов. А в случае аварии его можно быстро починить — правда, после этого придется учить ходить заново.
На самом деле, потенциал такой системы просто огромен. По сути, все, что вам нужно — это «компьютер и пара моторчиков». Остальные детали можно собрать прямо у себя под ногами. Такие роботы могут быть использованы для разведки в регионах, куда человеку не добраться, а посылать полноценные механизмы слишком дорого. Кроме того, подобных роботов можно собирать, например, при колонизации других планет. Можно, например, отправить сборочный модуль с запасом микропроцессоров и сервоприводов, а другие детали собрать уже по прибытии на место миссии.
Возможно, роботам не только не обязательно, но и опасно становиться человекоподобными. Психолог Марианн Брэндон считает, что реалистичность и доступность секс-роботов станет началом конца человеческой цивилизации. Люди перестанут стремиться поддерживать отношения в семьях с их неизбежными проблемами, когда можно будет с легкостью найти утешение у резиновой женщины с ИИ.
Сегодняшние роботы уже научились бегать, перепрыгивать препятствия и восстанавливать равновесие после того, как их пнули, а также вставать после того, как поскользнулись на банановой кожуре. Они могут ходить по лестницам или, если робот оснащен винтами, летать в сложных условиях, самостоятельно обходя препятствия (даже если летят роем). А робот-баскетболист, пусть и стоя на одном месте, уже обходит по точности трехочковых бросков лучших спортсменов.
Этот прогресс связан не столько с совершенствованием механических и электрических узлов, сколько с развитием вычислительной техники и подходов к программному обеспечению. В основе многих роботов, способных к самостоятельным решениям, лежат искусственные нейронные сети, программы, архитектура которых имитирует устройство биологической нервной системы и алгоритмы глубокого обучения.
Нейросети способны обучаться, если задать им правильную последовательность стимулов и соответствующее подкрепление. Этот подход был впервые предложен еще в 1950-е годы, но, так как тогда компьютеры были еще недостаточно мощными, весь потенциал нейросетей долго оставался нераскрытым. А когда стало возможным не только моделировать сеть из множества нейронов, но и получать большую обучающую выборку, тогда нейросети продемонстрировали свою способность работать практически с чем угодно. Сегодня они применяются буквально всюду — от поиска элементарных частиц, управления беспилотными машинами и диагностики рака до игры в Dota 2 и определения пола мышей по пискам.
А вот ещё один необычный робот-медуза который расчистит дно водоёмов
Инженеры из Германии создали подводного робота, который управляется внешним магнитным полем. Ученые скопировали принцип движения, который использую медузы.
Группа инженеров из Института интеллектуальных систем общества Макса Планка создала нового пассивного робота, плавающего в жидкости и перемещающего предметы. Он имеет форму звезды, у него есть 8 лопастей, восьмиконечная центральная части, с присоединенными намагниченными конечности с пассивными лопастями. Диаметр робота составляет около 3 мм.
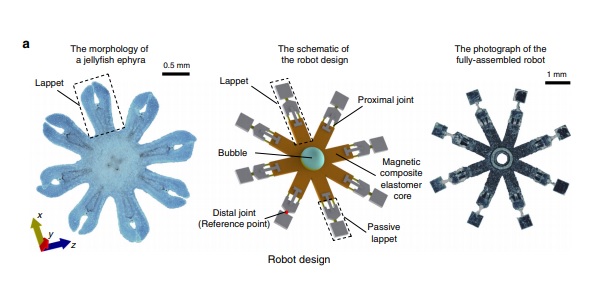
Центральная часть робота сделана из эластичного эластомера, в котором есть включения ферромагнитных частиц из неодима, железа и бора. После специальной обработки центральная часть при намагничивании изгибается и позволяет роботу двигаться. Робот может очищать дно от микроскопических частиц и поднимать их на поверхность. Еще одна задача, с которой он способен справиться — перемешивание различных жидкостей.
Источники:
hightech.plus/2019/07/03/inzheneri-sdelali-robota-iz-palok-on-sam-nauchilsya-hodit
chrdk.ru/news/japanese-palkorobot-popolz
edurobots.ru/2019/07/robomeduza/