

В 50-60-х годах начались разработки одних из наиболее экзотических видов аппаратов – "летающих платформ" и связанных с ними "летающих джипов". Первоначальное назначение "летающей платформы" – выполнение разведывательных заданий, рассчитывались они на полет одного человека. Больший же по размерам "летающий джип" казался потенциально полезным для выполнения множества различных задач.
Не так давно мы обсуждали Летательный аппарат HZ-1, но были и еще примеры конструкторской мысли …

"Летающей платформой" стали называть вертикально взлетающий аппарат с соосными винтами, расположенными в кольцевом канале. Разработка одноместных "летающих платформ" боевого использования началась в США в рамках исследовательской программы НАСА начала 1950-х годов. Испытания включали в себя пилотируемые привязные платформы, впервые поднялись в воздух с помощью сжатого воздуха, а затем с помощью роторов. Концепция, использованная при разработках, была предложена в свое время инженером НАСА Ч. Циммерманом, который уже известен читателю по его само-летам-"летающим блинам" V-173 и XF5U-1.
Фото 3.
Его предложение заключалось в следующем. Если ротор, например, разместить снизу основания аппарата, то пилот был бы способен управлять аппаратом при помощи перемещения собственного веса, т.н. "кинестетическое" управление. Это управление основано на инстинктивной реакции человека сохранять равновесие, когда он стоит или идет. В "летающей платформе" пилот для поворота машины в нужное положение наклоняется в требуемую сторону. Предполагалось, что такое управление позволит пилоту летать на такой платформе после небольшой тренировки.
Фото 4.

Предварительные испытания продемонстрировали техническую реализуемость концепции, после чего три компании – "Лакнер", "Бенсен" и "Хиллер" – получили контракты на разработку прототипа платформы.
Фото 5.
В середине 1950-х компания "Лакнер" разработала летательный аппарат, названный DH-4 "Helivector", позже переименованный в HZ-1 "Aerocycle", который выглядел чем-то вроде гибрида вертолета с подвесным двигателем с мотоциклом. Этот аппарат представлял собой конструкцию с установленным на ней двигателем "Mercury" мощностью 40 л.с. и посадочным устройством, состоящим из воздушных мешков на концах лонжеронов. Воздушные мешки позже были заменены металлическими подпорками. Двигатель управлял парой роторов противоположного вращения диаметром 4,6 м, установленных под двигателем, в то время как пилот стоял вертикально на платформе выше двигателя, будучи защищенным от падения в ротор привязными ремнями безопасности.
Фото 6.

"Helivector/Aerocycle" впервые полетел в январе 1955 г., полеты проходили успешно, после чего армия США заказала 12 аппаратов. По заявлениям представителей компании "Лакнер", что машина могла летать со скоростью до 105 км/ч и нести полезный груз весом 55 кг помимо пилота, продолжительность полета составляла около одного часа. Однако одна вещь напоминала, что летать было опасно. Мало того, что пилот стоял выше вращающихся роторов, но роторы конструктивно располагались близко к земле, делая опасным приземление и взлет, поскольку в них могли легко попадать камни и различные обломки.
Фото 7.

Некоторые источники утверждали, что "Helivector/Aerocycle" был прост в полете, но другие заявляли, ссылаясь на мнение летчиков-испытателей, что новички не могли пилотировать аппарат с полной безопасностью для себя. После того как произошли два летных происшествия, в которых роторы противоположного вращения изогнулись и столкнулись, проект был прекращен прежде, чем кто-то серьезно пострадал.
Фото 8.

Аппарат компании "Бенсен" под обозначением В-10 "Propcopter" был не более успешен. Эта неказистая небольшая машина состояла из квадратной рамы с воздушными винтами диаметром 1,2 м, установленными вертикально спереди и сзади рамы. Каждый вращался своим собственным двигателем "Маккалох" мощностью 72 л.с. "Propcopter" полетел в 1959 г. и, очевидно, был сложен в управлении.
Вскоре проект был прекращен.
Фото 9.

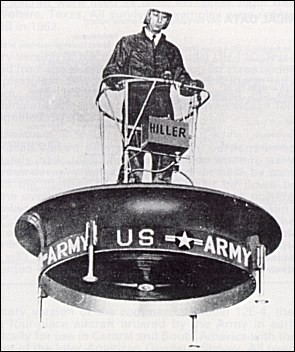
Проекты компании "Хиллер" были лучше продуманы и привлекли к себе много внимания. "Хиллер" разработал свою первую "летающую платформу" VZ-1 "Pawnee" на основе контракта, предоставленного в конце 1953 г. научно-исследовательским управлением ВМФ (ONR). Машина впервые взлетела в феврале 1955 г.
Фото 10.

VZ-1 имел пару роторов противоположного вращения диаметром 1,5 м, расположенных внутри кольцевого канала. Каждый ротор управлялся собственным двухтактным двигателем мощностью 40 л.с. Пилот стоял над кольцевым каналом, окруженный вокруг перилами и защищенный привязными ремнями безопасности. Он управлял двигателями при помощи ручки газа и наклонялся, чтобы вести аппарат в ту или другую сторону. Кольцевой канал улучшал безопасность при взлете и посадке. Кроме того, он также обеспечивал дополнительное приращение подъемной силы на 40%. Аппарат неплохо управлялся в полете, однако вскоре он был модифицирован: установили более длинные стойки шасси, чтобы увеличить клиренс, и поставили восемь рулей ниже канала, чтобы улучшить управление полетом.
Фото 11.

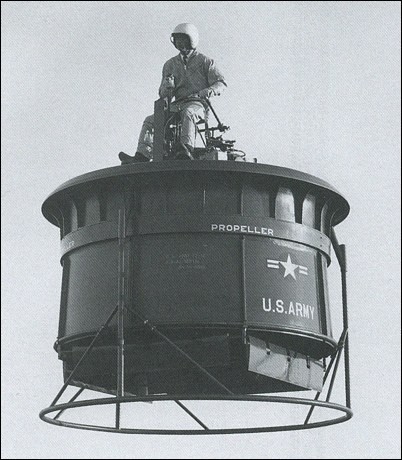
Армия США была заинтересована в VZ-1, и в ноябре 1956 г. фирме "Хиллер" был выдан контракт на постройку версии большего размера, которая выполнила свой первый полет в 1958 г. Новый аппарат имел три двигателя мощностью по 40 л.с., вращающих роторы в кольцевом канале диаметром 2,4 м. Это больше чем в два раза увеличило роторную область, увеличив вес полезного груза и дальность полета при уменьшении шума от двигателей.
Фото 12.

Армия заказала третий аппарат больших размеров. Вместо колесного шасси, как у двух более ранних образцов, было установлено лыжное шасси. Аппарат имел сиденье и обычное вертолетное средство управления, так как управление перемещением центра тяжести стало менее эффективным из-за увеличения мощности транспортного средства и веса. Эта версия впервые взлетела в 1959 г. VZ-1 имел свои достоинства, но он был в конечном счете оценен как слишком маленький, медленный и годный только для ограниченного использования. Армия отказалась от программы в 1963 г., и два из трех аппаратов сохранились только в музейных экспозициях.
Фото 13.

В то же самое время как проводились исследования "летающих платформ", по контрактам с армией США велись разработки больших летательных аппаратов типа "летающий джип". Так назывались летательные аппараты двухвинтовой продольной схемы или четырехвинто-вой. Первоначально "летающие джипы" задумывались как универсальное транспортное средство, которое должно было занять место между армейским автомобилем-вездеходом "Джип" и легким вертолетом. Его можно было использовать для транспортных или разведывательных операций, как подвижную платформу для стрельбы из безоткатных орудий, пуска ракет, для корректировки артиллерийского огня, установки радиоэлектронного оборудования и т.д. Исследования начались в 1956 г., затем был объявлен конкурс, в котором приняло участие около 20 фирм. Победителями были объявлены фирмы "Крайслер", "Кертисс-Райт" и "Пясецкий", которым выдали контракты на общую сумму 1,7 млрд. долларов для постройки прототипов.
"Крайслер" разработал два прототипа своего "летающего джипа" VZ-6, поставив их армии в конце 1958 г. VZ-6 был одноместное транспортное средство, имевшее форму прямоугольного ящика, с двумя роторами спереди и сзади. Имелись резиновые конические обтекатели вокруг основания аппарата, ниже роторов были установлены рули. В качестве силовой установки VZ-6 использовался единственный поршневой двигатель мощностью 500 л.с. Полеты на привязи, выполненные в 1959 г., показали, что VZ-6 не очень хорошо управлялся и имел недостаточную мощность. Первый свободный полет VZ-6 привел к переворачиванию аппарата. Пилот уцелел, но транспортное средство было сильно повреждено. Армия признала VZ-6 неудачной разработкой, оба прототипа отправили на слом в 1960 г.
Фото 14.

Разработанный фирмой «Кертисс-Райт» аппарат VZ-7 был известен также как «летающий грузовик». Два прототипа были поставлены армии в середине 1958 г. VZ-7 представлял собой простую металлическую ферму с пилотом спереди и четырьмя винтами, расположенными по углам. Все воздушные винты управлялись единственным двигателем «Artouste» мощностью 425 л.с. Аппарат управлялся дифференцированным изменением шага винтов, а также рулями. VZ-7 был длиной 5,2 м и шириной 4,9 м и имел максимальный взлетный вес 770 кг, аппарат мог нести 250 кг полезного груза. VZ-7 управлялся хорошо и был прост в полете, но он не выполнял требования по высоте и скорости полета. Вскоре испытания закончили, а прототипы возвратили на фирму в середине 1960 г.
Фото 15.

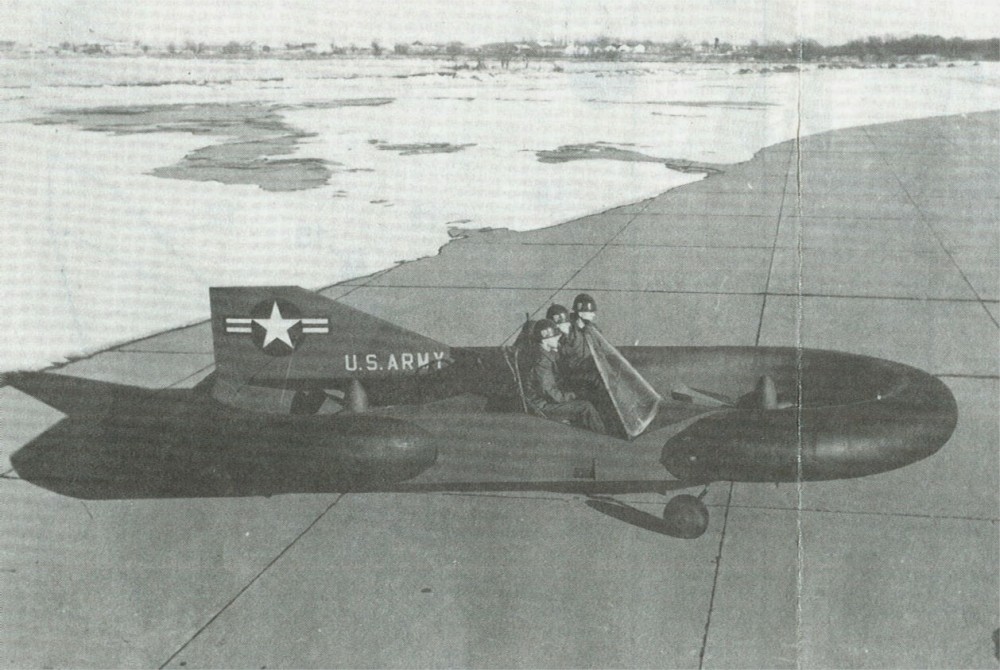
Усилия фирмы «Пясецкий» по созданию «летающего джипа» были наиболее успешны из трех фирм-конкурсантов. Первым ее аппаратом был «Model 59H AirGeep», которому дали армейское обозначение VZ-8P. VZ-8P был длиной 7,9 м и шириной 2,7 м, трехлопастные роторы располагались спереди и сзади, между ними размещались пилот и пассажир. В VZ-8P роторы диаметром 2,4 м управлялись парой поршневых двигателей «Lycoming» мощностью по 180 л.с., причем один двигатель мог управлять обоими роторами, если другой двигатель выходил из строя. Роторы вращались в противоположных направлениях. Управление обеспечивалось изменением шага винта, а также рулями, установленными снизу. Движение вперед достигалось при опускании носа аппарата вниз.
Первый полет VZ-8P состоялся 12 октября 1958 г. По результатам испытательного полета было принято решение поставить более мощную силовую установку. Аппарат вернули на фирму для замены поршневых двигателей одним газотурбинным двигателем «Artouste» IIB мощностью 425 л.с., модернизированный VZ-8P полетел в конце июня 1959 г. Он весил 1,1 тонны и мог нести груз 550 килограммов, включая пилота.
VZ-8P участвовал также и в конкурсе на разработку «летающего джипа» для ВМФ, который начался в июне 1961 г. На него поставили еще более мощный двигатель «Airesearch» 331-6, помимо этого аппарат оснастили поплавками. Новая версия аппарата получила обозначение РА-59 «SeaGeep».
Фото 16.

Фирма «Пясецкий» построила в рамках нового контракта еще один аппарат под обозначением «Model 59K» (армейское обозначение VZ-8P (В) «AirGeep II»), который совершил свой первый полет летом 1962 г. Аппарат VZ-8P (В) был подобен своему предшественнику, за исключением того, что конструкция имела в середине небольшой излом. Считалось, что небольшой наклон носового и хвостового роторов позволит уменьшить лобовое сопротивление в горизонтальном полете. В качестве силовой установки для VZ-8P (В) использовали два двигателя «Artouste» ПС мощностью по 400 л.с., связанных так, что при выходе одного двигателя из строя другой мог управлять обоими роторами. Один двигатель мог также быть связан с колесным шасси, чтобы управлять машиной при движении по земле. Увеличенная мощность силовой установки позволила достичь максимального взлетного веса 2200 кг. Пилот и наблюдатель имели катапультируемые кресла, которые позволяли экипажу спастись практически при нулевой скорости движения аппарата. Кроме того, на аппарате имелось место для размещения дополнительных пассажиров или грузов.
Опыт эксплуатации «летающих платформ» и «летающих джипов» в 50-60-х годах показал, что они имели некоторые достоинства, в частности были по размерам меньше вертолетов и могли работать на земле более успешно. Однако вертолеты могли легко приземляться в гористой местности и имели более удобные размещения пассажирских кресел. Наибольшим недостатком считалось, что «летающие платформы» и «летающие джипы» имели небольшие площади роторов, т.к. это являлось причиной их неустойчивости на некоторых режимах, и относительно большой расход топлива. А поскольку они не показали достаточных преимуществ перед вертолетами, то и дальнейшее их развитие было приостановлено.

Однако в конце 90-х годов снова появился интерес к аппаратам этого типа. Американская фирма «Millennium Jet» (Саннивейл, шт. Калифорния) разработала проект необычного аппарата под названием «SoloTrek» XFV. Он представляет собой гибрид «летающей платформы» и конвертоплана. Пилот располагается в аппарате стоя, над его головой находятся два винта диаметром 0,9 м в кольцевых каналах, управление аппаратом осуществляется двумя ручками в подлокотниках. Правая ручка – для путевого управления, а левая ручка – для управления оборотами двигателей. Пилот, помимо обычных пилотажных приборов, имеет дисплей, встроенный в очки шлема. При горизонтальном движении (вперед или назад) винты синхронно отклоняются от вертикальной оси, при повороте аппарата вокруг вертикальной оси осуществляется дифференциальное отклонение винтов.

SoloTrek» имеет полный вес 318 кг, крейсерскую скорость – 95 км/ч, максимальную скорость – 130 км/ч, запас топлива – 38 л, дальность – 240 км. Потолок, как ожидается, будет составлять 2440 м, хотя практически аппарат будет летать на малых высотах. Прототип «SoloTrek» имел двигатель «Hirth» F30 мощностью 120 л.с. Этот двигатель часто используется на сверхлегких самолетах. Он может вращать винты со скоростью до 5000 об/мин, хотя предполагается, что аппарат будет взлетать на 3500 об/мин. Винты изготовлены из композиционного материала «нейлона-углепластика» и могут выдерживать столкновения с птицами. В серийном производстве «SoloTrek», вероятно, будет оборудован двигателем WTS-125 мощностью 125 л.с. В комплект аппарата «SoloTrek» включен парашют, который раскрывается автоматически по сигналу акселерометра, если аппарат начинает падать. В конце октября 2000 г. опытный аппарат испытывался в центре им. Эймса (Калифорния). Его конструктор Майкл Мошиер, бывший летчик ВМФ США, полагает, что «пришло время для самолетов, подобных «SoloTrek».

Израильская компания «Aero-Design & Development» (AD&D) работала над «летающей платформой» под названием «Hummingbird» («Колибри»), которая имеет сходство с аппаратом фирмы «Хиллер». Аппарат «Hummingbird» построен с использованием современных технологий, например, для уменьшения веса в конструкции ис-
пользуются композиционные материалы. Силовая установка аппарата состоит из четырех поршневых двигателей. Вес аппарата – около 115 кг, максимальная продолжительность полета – 45 минут со скоростью 45 км/ч.

Фирма «Millennium Jet» разрабатывает еще один аппарат под названием «DuoTrek», который представляет собой гибрид вертолета и конвертоплана. «DuoTrek» имеет в длину 4,8 м, полностью загруженный весит 660 кг, может нести 160 кг полезного груза на дальность 550 км. Разрабатываются варианты аппарата с двумя и четырьмя винтами, рассчитанные на экипаж из одного и двух человек. Этой разработкой заинтересовалось управление перспективных исследований Министерства обороны США.
Другая американская компания РАМ (шт. Вирджиния) работала над «летающей платформой» начиная с 1989 г. и построила аппарат ILV (Individual Lifting Vehicle). Аппарат ILV напоминает интересную смесь различных ранних проектов «летающих платформ». Он представляет собой простую трубчатую конструкцию диаметром приблизительно 3 м на опорах, оснащенную двумя двигателями «Hirth» F-30 мощностью по 195 л.с., каждый из которых вращает винт диаметром 2,8 м. Управление обеспечивается пилотом, который стоит на вершине платформы и использует способ управления путем перемещения центра тяжести. Аппарат РАМ 100В имеет пустой вес приблизительно 300 кг, может нести полезный груз весом до 200 кг, максимальная скорость составляет 100 км/ч, а дальность – 40 км. Компания предполагает использовать аппарат, в частности, для охраны стад рогатого скота или для опыления сельскохозяйственных культур.
источники
http://ufosecret.ru/page_816.html
http://www.a-sergeich.ru/index.php/articles/4-anyarticles/15-hillerflyingplatform
http://masterok.livejournal.com/2929080.html
Давайте еще посмотрим на Надувной самолет или например как вам Самолет с косым крылом плюс к тому Самолет без крыльев или «летающая ванна». Ну и конечно же Самолёт-амфибия вертикального взлёта и посадки ВВА-14, а вот Самолет — ручка X-3 «Stiletto».