

В статье, опубликованной в Science Robotics, инженеры из Университета Бригама Янга (Brigham Young University) подробно описывают новую технологию, которая позволяет им встраивать сложные механизмы во внешнюю часть конструкции, не занимая при этом реального внутреннего пространства.
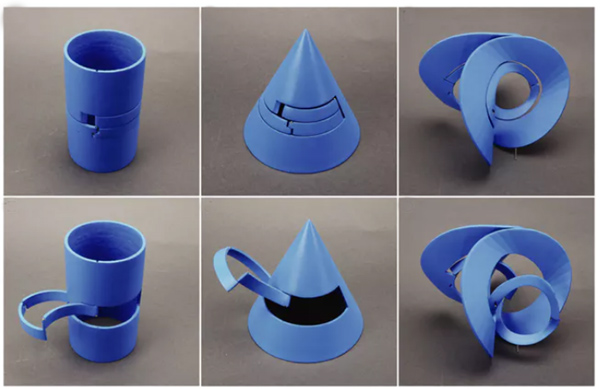
Новый класс «развертываемых механизмов» получил название, от развертываемых поверхностей или материалов, которые могут принимать трехмерные формы из плоских, без растяжений или разрывов, как лист бумаги или металла. Их особенность заключается в расширении потенциала изогнутых поверхностей.
Новый класс механических конструкций возник из работ исследователя Ларри Хауэлла, профессора машиностроения, и его коллеги Спенсера Маглби над созданием оригами, выполненной в сотрудничестве с художником оригами Робертом Лангом. От солнечных батарей для НАСА до пуленепробиваемых барьеров для сотрудников полиции. Когда группа исследователей перешла к изогнутым принципам оригами, математически был раскрыт новый способ создания более сложных машин.
Эти поверхности находятся на изогнутой части (как, например, руки костюма Железного Человека) и могут трансформироваться или изменяться при развертывании для выполнения уникальных функций. Когда они не используются, они могут легко складываться обратно на поверхность конструкции. Открытие позволит создавать компактные комплексные механизмы, встраиваемые в поверхности для выполнения сложных задач. По словам инженеров, сейчас это является очень важным, поскольку медицина, космическая и военная отрасли постоянно работают над тем, чтобы получить дополнительные возможности в меньшем пространстве устройств.
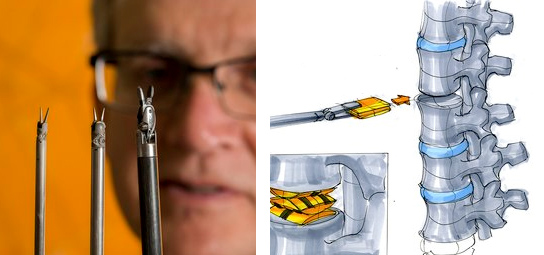
Разработчики отмечают, что новая технология позволит создавать сложные машины, которые интегрируются в поверхность, обладают сложными функциональными возможностями, занимая при этом меньше пространства. Это открывает целый новый мир потенциальных устройств для медицинской, космической и военной отраслей (например, хирургические инструменты, которые могут одновременно разрезать и включать свет во время малоинвазивной хирургии; колёса со встроенными шипами для скалолазания). Развертываемые механизмы можно использовать для создания транспортных средств, которые смогут полностью скрывать часть внешних элементов, колес, выпускающих при необходимости «когти», пуленепробиваемых барьеров для полицейских и многого другого. Прежде такие устройства можно было увидеть только в фильмах, но наука постепенно догоняет научную фантастику.

Исследования заняли более 10 лет, а вдохновило ученых обычное оригами. Математика раскрыла потенциал сложных механизмов, как только команда перешла к изогнутым поверхностям.
Классификация механизмов (виды механизмов)
Виды механизмов:
1 — Рычажные механизмы
2 — Кулачковые механизмы
3 — Зубчатые механизмы
4 — Клиновые механизмы
5 — Винтовые механизмы
6 — Фрикционные механизмы
7 — Гидравлические механизмы
8 — Пневматические механизмы
9 — Механизмы с электрическим устройством
Все механизмы, составленные только из твердых тел, разделяются на две большие группы: механизмы с низшими парами и механизмы с высшими парами.
Механизмы с низшими парами называют стержневыми или рычажными.

Рычажные механизмы
Простейшие рычажные механизмы состоят их 4-х звеньев, включая стойку и делятся на:
— кривошипно – коромысловые;
— кривошипно – ползунные;
— кулисные.
Шарнирный четырехзвенник может быть 3-х видов:
— кривошипно – коромысловый;
— двухкривошипный;
— двухкоромысловый.
Количество типов и видов механизмов исчисляется тысячами, поэтому классификация их необходима с целью облегчения возможности выбора того или иного механизма из большого ряда существующих, а также для проведения синтеза механизмов.
Универсальной классификации механизмов пока не существует. Наиболее распространены следующие виды классификации:
• функциональная(приведена в учебнике С.Н. Кожевникова /1/), в основу которой положен принцип выполнения механизмом того или иного технологического процесса, а именно механизмы:
— приведения в движение режущего инструмента;
— питания, загрузки, съёма детали;
— транспортирования и т.д.
• структурно-конструктивная, предложенная И.И.Артоболевским /2/, которая предусматривает разделение механизмов как по конструктивным особенностям, так и по структурным принципам, а именно механизмы:
— кривошипно-ползунные;
— кулисные;
— рычажно-зубчатые;
— кулачково-рычажные и т.д.
• структурная; эта классификация проста, рациональна, тесно связана с образованием механизма, его строением, методами кинематического и силового анализа.
Она предложена Л.В. Ассуром в 1916 году и основана на принципе наслоения кинематических цепей (в виде структурных групп).
Согласно этой классификации любой механизм можно получить из более простого путём присоединения к последнему кинематических цепей с числом степеней свободы W = 0.
Кинематические цепи, имеющие W = 0, получили название структурных групп или групп Ассура. Недостаток этой классификации – неудобство при выборе механизма с требуемыми свойствами.
Источники:
naukatv.ru/news/24926
news.rambler.ru/other/41724186/?utm_content=rnews&utm_medium=read_more&utm_source=copylink
naukatehnika.com/nauka-dognala-nauchnuyu-fantastiku.html
edu.tltsu.ru/er/book_view.php?book_id=1842&page_id=13982
studfiles.net/preview/6022243/page:3/